高灵敏测量雷达模组-产品型号:RDCJ-GRF
一. 概述毫米波雷达模组的工作频率 24GHz,采用单发多收微带天线形式,发射调频连续波(FMCW)信号,接收高动态运动小目标反射回波信号,测量高动态运动小目标的实时速度、距离和角度。应用方向:主要用于测量高动态目标。二. 技术特点目标速度检测;目标距离检测;目标角度检测;模组自身倾斜角度的自动检测;体积小、重量轻、功耗低;对外输出接口 LVTTL。三. 技
一. 概述毫米波雷达模组的工作频率 24GHz,采用单发多收微带天线形式,发射调频连续波(FMCW)信号,接收高动态运动小目标反射回波信号,测量高动态运动小目标的实时速度、距离和角度。应用方向:主要用于测量高动态目标。二. 技术特点目标速度检测;目标距离检测;目标角度检测;模组自身倾斜角度的自动检测;体积小、重量轻、功耗低;对外输出接口 LVTTL。三. 技
一. 概述
毫米波雷达模组的工作频率 24GHz,采用单发多收微带天线形式,
发射调频连续波(FMCW)信号,接收高动态运动小目标反射回波信
号,测量高动态运动小目标的实时速度、距离和角度。
应用方向:主要用于测量高动态目标。
二. 技术特点
目标速度检测;
目标距离检测;
目标角度检测;
模组自身倾斜角度的自动检测;
体积小、重量轻、功耗低;
对外输出接口 LVTTL。
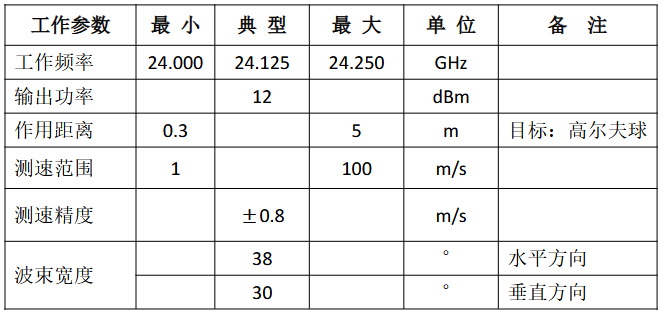
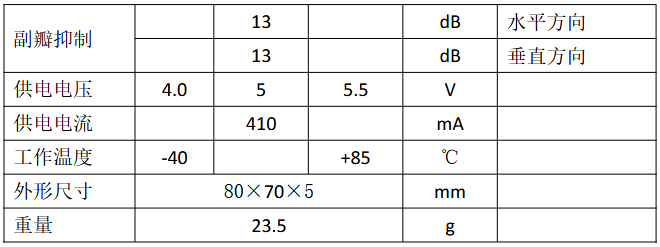
三. 技术指标
主要指标情况如下:
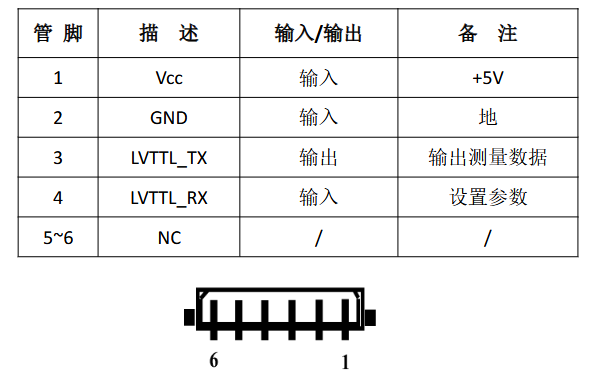
四. 对外接口定义
对外接口管脚定义如下:
五. 对外接口通信协议
对外接口 LVTTL,测量数据输出速率 115200bit/s。雷达持续上
报数据,数据帧共 22 个字节,帧格式及协议定义如下表(十六进制)
所示。
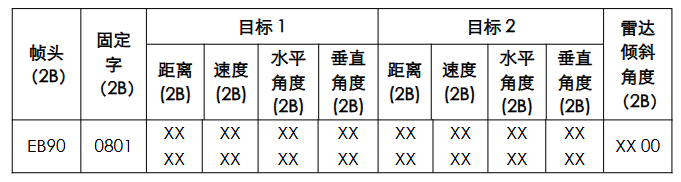
帧头(2B):固定数“EB90”。
固定字(2B):固定数“0801”。
目标 1 数据(8B):分别输出测量的目标 1 距离、速度、水平角度和垂直角度数据,其中输出距离数据为实际数据乘以 100倍。如输出数据为“0032006400060020”,表示目标 1 距离为0.5m,速度为 100m/s,水平角度为 6 度,垂直角度为 32 度。
目标 2 数据(8B):分别输出测量的目标 2 距离、速度、水平角度和垂直角度数据,其中输出距离数据为实际数据乘以 100倍。如输出数据为“008C003600030014”,表示目标 2 距离为1.4m,速度为 54m/s,水平角度为 3 度,垂直角度为 20 度。
雷达倾斜角度(2B):高 8 位为雷达模组板俯仰方向倾斜角度,低 8 位填固定数“00”。如输出“0300”表示雷达放置位置处,;雷达板俯仰方向倾斜量 3 度。
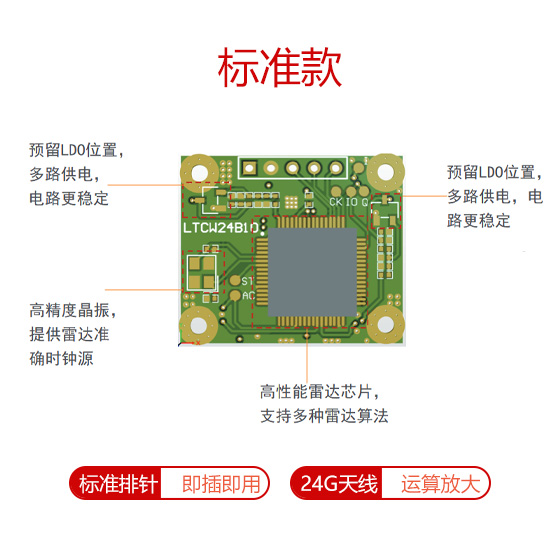
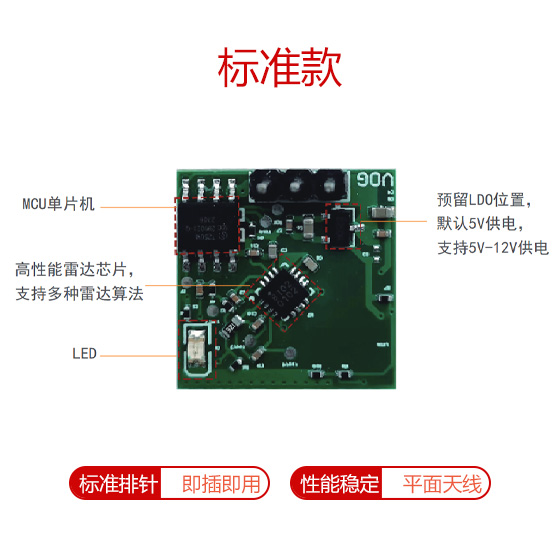
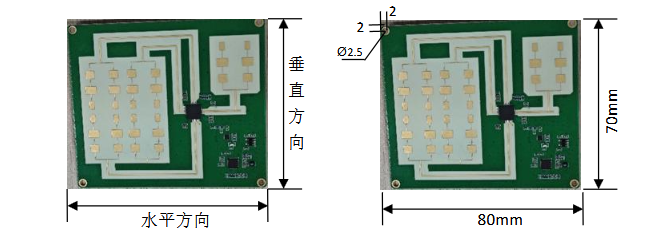
六. 产品外形及安装尺寸
产品外形图如下图所示:
七. 角度定义
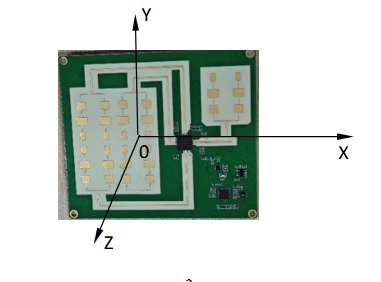
该雷达模组可实时测量目标的二维角度,即目标相对雷达模组的水平方向偏角 XOZ 和垂直方向偏角 YOZ,其中 Z 方向为雷达模组的法向方向。
雷达测量目标的角度,其水平方向偏向 X 正方向为正角度,偏向 X 负方向为负角度;垂直方向偏向 Y 正方向为正角度,偏向 Y 负方向为负角度。
八. 安装要求
1. 该雷达仅测量运动目标,不测量处于完全静止的目标。
2. 雷达安装固定在透波的壳体中,雷达辐射面指向目标运动方向。
3. 雷达辐射面前方不允许有物体遮挡,否则影响雷达工作。